

MaixPy3 视觉模块开发
2022年07月22日 最新进度可以通过查看共享文档获得:https://www.kdocs.cn/l/cfdsBPVRhXxo
项目简介:
由于 MaixPy3 的环境传统视觉功能薄弱,所有需要结合 openmv 文档实现视觉模块的基础 API 功能以及应用,相关功能也会体现在产品介绍当中,其中一些相关模块可能配合应用需要完成,应用示例文档参考如下:https://book.openmv.cc/image/
- Feature-Detection 特征检测
- Image-Filters 图像滤波
- Color-Tracking 颜色追踪
- Codes-Tracking 标记追踪
依赖如下仓库,可在 X86 ubuntu20 本机仿真。
实现目标:(请查看底部最新进度)
能够满足如下应用:获取图像统计信息 / 寻找色块 / AprilTag标记跟踪 / 模板匹配 / 多模板匹配 / 特征点检测 / 测距 / 扫码识别 / 颜色形状同时识别 / 颜色模板匹配同时识别 / 高级特征
上图来自 maixpy3 文档 https://wiki.sipeed.com/soft/maixpy3/zh/usage/vision/maixpy3-example.html
代码原型:
MaixPy3 image 模块环境(用户直接调用的 API 层接口)
https://github.com/sipeed/MaixPy3/blob/develop/ext_modules/_maix_image/include/maix_image.h#L67
Libmaix imlib 模块环境(Openmv 底层核心算法)
https://github.com/sipeed/libmaix/blob/develop/examples/imlib_test/main/src/main.c#L190
开发指导:
- 在 maixpy3 的 develop 里准备好了所有需要的环境
- 接口采用 image.xxx 通过参数选择所用的函数。
- 每个模块都要包装到可用的示例代码程度,先设计示例代码再封装功能函数,最后才去实现。
- 在 ubuntu20 上测试过后再到实机中开发,可以节约大量生命。
本模块邀请开源社区的同学一起开发,参与到开发或测试的同学可以直接领取 V831 和 R329 硬件,参与度(提交)足够的情况下是可以不用归还的,所以要来就进群吧!预计开发周期为一、二个月,我会在本周确认参与的开发人员,请自带 ubuntu20 实机测试环境喔,摄像头和屏幕缺一不可,参与者在外部参与人员中登记。
官方负责人员:
- 陈俊欢 (大佬鼠)
- 万启超
外部参与人员:
- 戚晨夕
- 王晓
- 刘子健
- Steven
- 刘闫兴
- Alex
- 曾广仕
- 叶炯凯
- 针针扎
- 斌
- 张罗东
- 爱笑的莫妮卡
- 奈奎斯特不稳定
- 黄涛
- 东东
- 吴冰晶
- 李伟
分工情况:
主要划分为 开发 和 测试 两块
测试 主要负责内容为准备测试案例、测试效果、文档接口说明,整理好需要开发做的功能和流程,协助开发实现。
开发 主要负责具体代码的编写和实现,从 C / C++ 到 Python 平台的适配,根据文档完成接口的输入输出,配合测试文档完成功能。
请在微信群中备注自己的名称,然后想做的部分登记在这里,最后再进行分工,工作内容主要分开发和测试,无论是开发还是测试都需要在本机准备好环境,先在 ubuntu20 完成功能测试后再上到实机测试,可以提高效率,节约生命。
- 陈俊欢 开发
- 万启超 开发
- Steven 开发
- Alex 测试
- 张罗东 测试
- 爱笑的莫妮卡 测试
- 叶炯凯 测试
- 图像拼接、融合:画中画、多张局部图像合成一张全局图像、
- 物体检测:帧差分法(检测有无物体运动,实现简单快速),光流检测(进一步获取物体运动轨迹)
- 分割: 漫水填充(魔术棒、需要找到一个种子点)
- 滤波:(时域、快)高斯、均值、中值、双边、NLM、导向滤波 (频域、慢)同态、带阻/带通滤波、小波
- 增强:gamma、自适应直方图均衡、自适应对比度、白平衡相关(灰度世界···)
- 针针扎 测试
- 斌 测试
- 刘子健(兔子) 测试
- 奈奎斯特不稳定 测试
- 透视矫正:将原本的透视图转换为俯视图或者任意一个平面(可以准确得获得图像信息)
- 距离测试:获取与指定物体的距离
- 标记跟踪定位:包括测距,定位物体与镜头的相对位置,在以定位物体为原点的坐标系中获取摄像头的位置,或者以摄像头为中心原点获取定位物的坐标(以俯视图为平面的二维坐标或者直接在三维上返回六个自由度)
- 快速线性回归:对连续的曲线进行分析,得出曲线的运动趋势。
- 曾广仕 开发
- 黄涛 测试
- 东东 开发
- pepsi 测试
- 王晓 开发
- 胡宗向 测试
- 刘闫兴 开发
- 芃芃爹 测试
- 吴冰晶 测试
- taorye 开发
- 李伟 测试
- SimonLiu 测试
问与答
Q:如何参与?
A:进群加入我们的讨论吧!
Q:如何提交?
A:直接在 MaixPy3 和 Libmaix 的仓库上提交或 PR 就行,最终也是看提交的。
Q:如何开发?选择了 测试就不可以开发了吗?
A:测试是起点,代表内测用户的体验,然后开发是基于测试的内容进行的,这代表测试和开发都可以一起做,互不冲突,只是侧重点不同。
e
Q:开发需要做什么?测试需要做什么?
A:开发的需要了解底层实现和代码在哪,能够跑代码修代码测代码改代码。测试需要了解用户是如何使用的,能够说明这个功能是怎么设计怎么使用的,需要什么接口,使用流程是怎样的?文档说明提供出来。开发需要实现对应功能的移植优化,做好鲁棒性,做好接口的统一封装,让使用者不需要了解内部数据流转的细节,调用相应接口就可以完成输出需要的数据
Q:报错 InportError: No module named pybind11 ?
A:安装 sudo apt install python3-pybind11 或 pip3 intall pybind11
项目进度:
第一次会议 2022-03-29 (准备中,计划 9 点左右)
会议主题:
主要目的是分析现有应用所需要的模块,确保分工方式和合并方式,依赖模块为 特征检测 图像滤波 颜色追踪 标记追踪。
目前为大佬鼠想象的,可能不准确,需要结合文档示例代码来分析所需接口,还有待探讨。
底层实现肯定都是存在的,但不代表完美可用,所以才需要封装。
假设两个人一组,分测试和开发,测试先确定文档和示例代码效果,开发先分析要做的模块都有哪些,最后我们统一汇总各个讯息。
确定接口内容我们再开始,由我@Juwan 负责统筹确保项目运作。
功能表(如果发现有更多有意义有需要的功能可以分析后继续添加)
- 获取指定区域图像统计信息 https://book.openmv.cc/image/statistics.html
- 颜色空间处理,如 LAB RGB HSV
- 平均数、中位数、众数、标准差,最大最小值
- (过时)特征检测模块(准备用自学习检测取代)
- 模板匹配、多模板匹配、特征点检测 https://book.openmv.cc/image/keypoints.html
- 颜色追踪模块
- 颜色、线条、形状同时识别 https://book.openmv.cc/image/blob_circle.html
- 标记追踪模块
- 条形码、二维码扫码与定位 https://book.openmv.cc/image/code.html
- AprilTag标记跟踪 测距 https://book.openmv.cc/image/ranging.html
- 图像滤波模块 https://book.openmv.cc/example/04-Image-Filters/adaptive-histogram-equalization.html
- 各种图像滤波、边缘滤波、腐蚀膨胀
- 锐化、取反、二值化、直方图均衡、旋转校正
- (过时)高级特征 HAAR HOG LBP (方法)
- 人脸、眼球、梯度方向和强度的统
准备工作、如何协作、如何提交?
环境、代码、功能、接口
首先在开始硬件开发之前,我们需要准备好 ubuntu20 系统,要确保能够访问摄像头方便测试。
请准备上述两个模块,测试和开发的同学都需要,请通过 git clone 获取上述仓库。
拉取子模块 'git submodule update --init --recursive'
这里有自动化编译的命令给你们参考如何编译a。
准备工作需要做什么?
MaixPy3 文档 https://github.com/sipeed/MaixPy3/blob/develop/docs/develop.md
MaixPy3 编译流程 https://github.com/sipeed/MaixPy3/blob/release/.github/workflows/maixpy3_build.yml#L19-L34
libmaix 文档 https://github.com/sipeed/libmaix/blob/develop/README_ZH.md
libmaix 编译流程 https://github.com/sipeed/libmaix/blob/develop/.github/workflows/test_build.yml#L26-L36
MaixPy3 编译安装的结果(不要在 jupyter notebook 里写死循环!)
了解本文 https://wiki.sipeed.com/soft/maixpy3/zh/install/install.html 完成 maixpy3 的安装与测试。
测试人员需要会写 markdown 并能够安装 MaixPy3 并运行测试,会用 jupyter 记录运行结果,能够一步步测试给出反馈和结果,如下图。
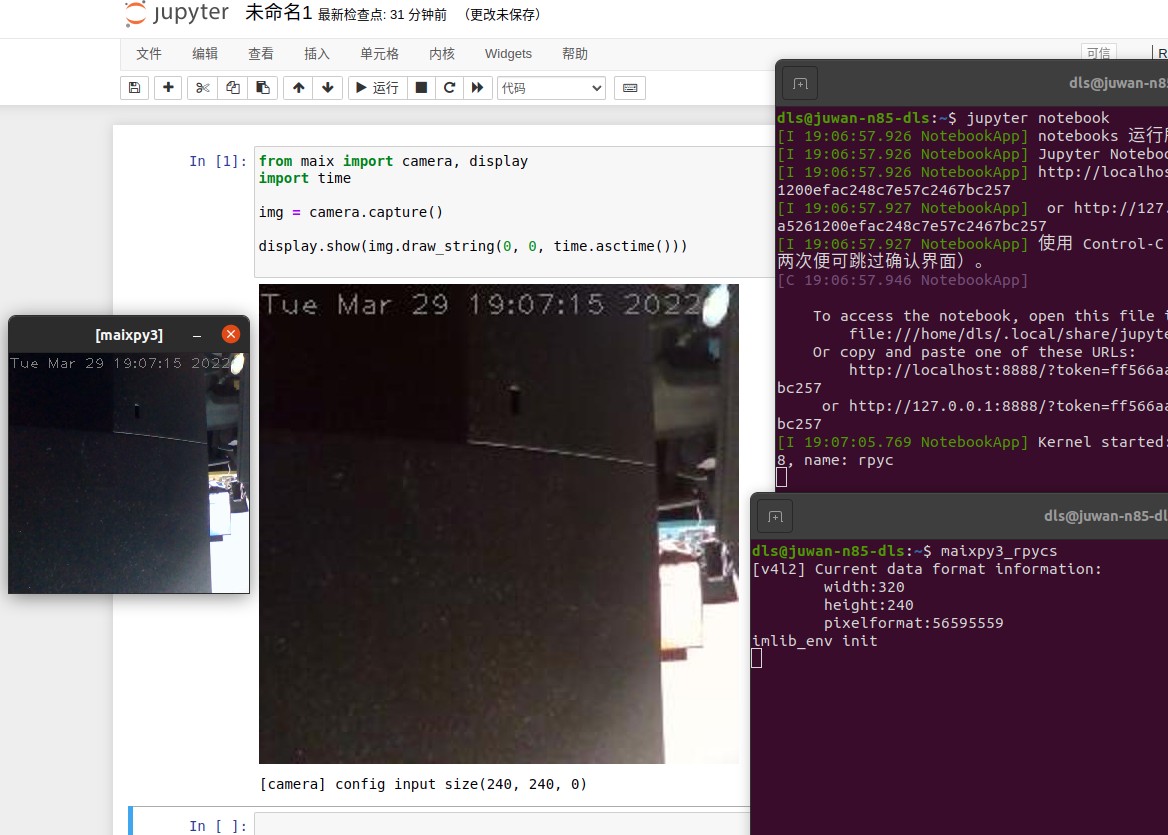
libmaix 编译安装的结果
开发人员需要能够编译 libmaix 和 MaixPy3 的运行、调试、打包,学会编译运行最基础的 camera 项目即可,知道如何使用 libmaix 的项目就行,测试人员不需要了解 libmaix 的编译与测试。
cd ~/MaixPy3/ext_modules/libmaix/examples/imlib_test
python3 project.py --toolchain /usr/bin --toolchain-prefix x86_64-linux-gnu- config
python3 project.py menuconfig

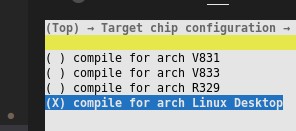
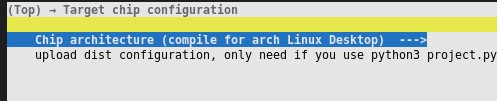
确认启用了模块。

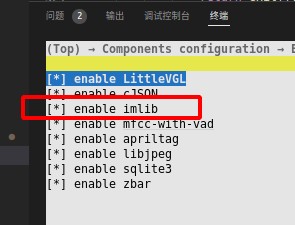
编译 python3 project.py build 出来
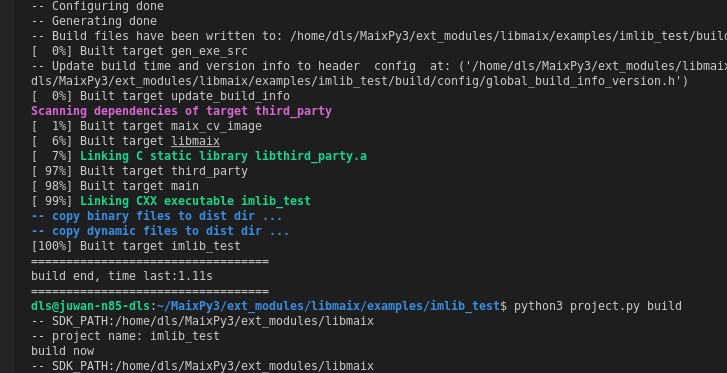
然后直接 ./dist/start_app.sh 就行,我的示例代码演示了 find_line & rotation_corr 。
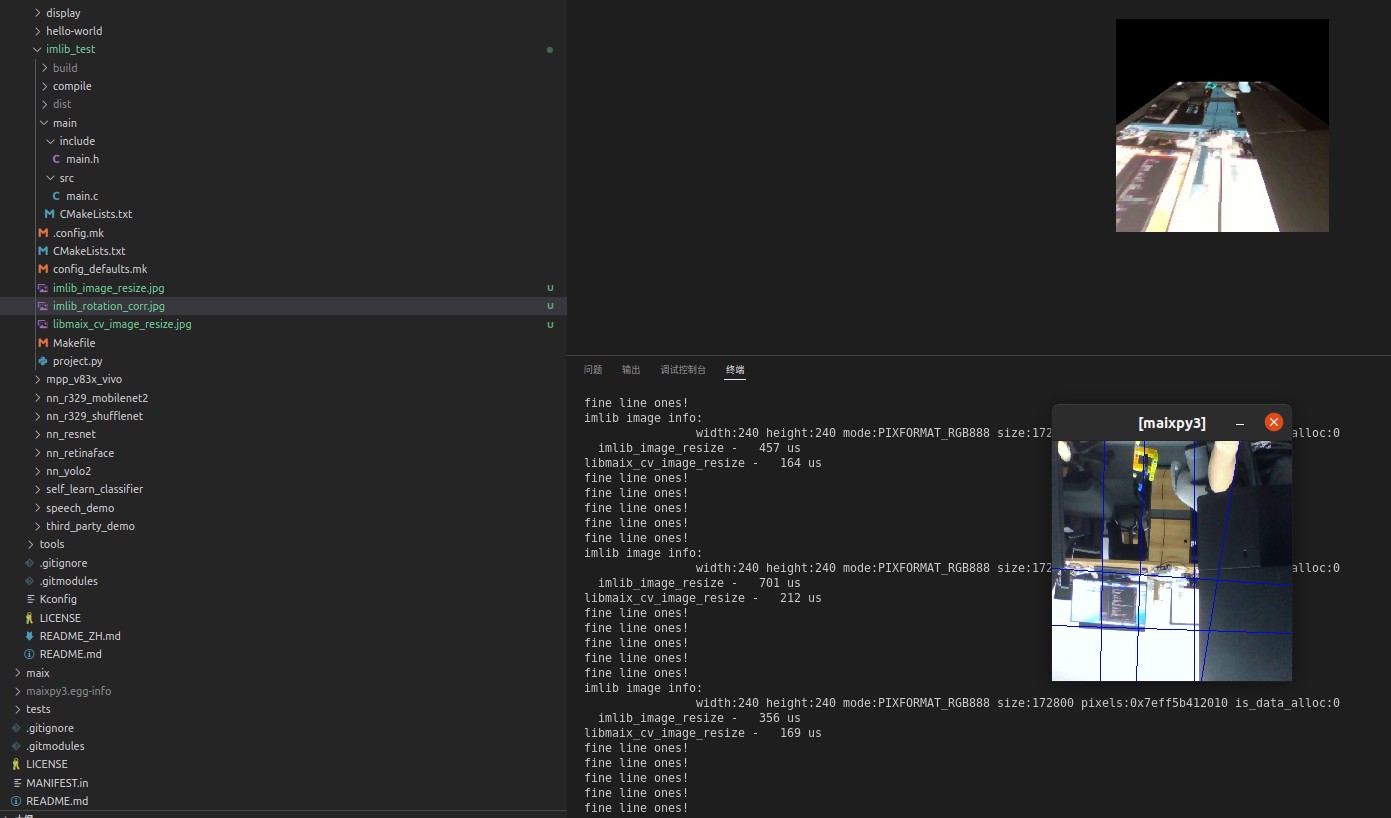
这表示你具备了本机的开发环境,最起码的开发和调试环境,它会调用默认的 /dev/video0 设备显示并使用,如上图所示。
提交内容都有什么?如何提交你的成果?
验收方式怎么做?测试怎么设计?用户怎么使用?
最终测试人员要提供的内容有一份 jupyter notebook 文档(含测试用例、示例代码,测试报告说明),最终会以作者署名的方式提交到 wiki.sipeed.com 文档中,请参考我们其他文档是怎么写的 。
最终开发人员要提供属于自己的提交和署名,如何 PR 提交等如何使用开发、测试、发布分支,包含独立的测试代码和自己的开发工程,从 imlib_test 拷贝出来即可。
会议纪要:
- 需要确认人员和准备工作(已经标黄,其他同学没有参加会议对请确认准备工作对内容后,自行标黄表示已得知,之后我会在这些同学里进行了解和分配)
- 需要确认项目内容与全员同步(请看功能表,请继续补充,直到我们所有人准备好的时候,进行第一次合作开发,提前准备好的同学直接和我说就行)
- 需要确认各自的定位和分工(开发和测试对内容应该都清楚了,准备好各自对要点就行,我们挨个挨个对,先收集所有必备对功能点)
- 需要确认项目的提交与合并方式(使用 github 进行切到开发 develop 分支提交代码完成功能后最后统一 pr 进入 future 分支,最终合并回 release 分支完成最终的提交和代码审计)
第二次会议 2022-04-02 (准备中,计划 9 点左右)
在准备阶段,确保开发准备好开发环境(可电脑运行),测试准备好测试环境(可导出文档),最后准备完毕后继续。
可以在节假日的时候进行人员的确认和分工,以及参与人员的统计,确定本次开发的功能列表以及进度表,预计完成时间,由我牵头开发的同学一起完成,如果出现人员特殊意外均由官方人员兜底,不会影响整体进度,如果其他同学因为事情搁置则提前移交任务出来给其他人继续完成,比如@Juwan 可以保证所有功能没有人处理的时候亲自处理。
在下一次会议来之前,需要统计好需要增加的功能,进而准备 API 设计和测试文档,测试即文档,可见下文。
MaixPy3 image 现有功能表
>>> t = camera.capture()
>>> t.
t.c_img_private( t.draw_string( t.new(
t.clear( t.find_ball_color( t.open(
t.convert( t.find_blob_lab( t.resize(
t.copy( t.find_blobs( t.rotate(
t.crop( t.find_circles_blob( t.save(
t.custom_find_ball_blob( t.find_line( t.set_pixel(
t.delete( t.get_blob_color( t.show(
t.draw_circle( t.get_blob_lab( t.size
t.draw_ellipse( t.get_pixel( t.tobytes(
t.draw_image( t.height t.width
t.draw_line( t.load(
t.draw_rectangle( t.mode
>>>
image 模块:
- 属性查询 API :width 、height 、mode、size
- 文件读写 API :new 、load、open 、 save、delete
- 图像处理 API :tobytes、copy、crop、get_pixel、set_pixel、draw_xxxx、get_blob_color、rotate、clear、convert、show
- 视觉算法 API :find_xxxx、
预期增强的功能表(源自于第一次会议的草稿,可随时添加更多功能,取决于有没有必要)
- 获取指定区域图像统计信息 https://book.openmv.cc/image/statistics.html
- 颜色空间处理,如 LAB RGB HSV
- 平均数、中位数、众数、标准差,最大值、最小值
- 颜色追踪模块
- 颜色、线条、线段、方块、形状同时识别 https://book.openmv.cc/image/blob_circle.html
- find_rects
- find_lines
- find_circles
- find_line_segments
- 标记追踪模块
- 条形码、二维码扫码与定位 https://book.openmv.cc/image/code.html
- AprilTag标记跟踪 测距 https://book.openmv.cc/image/ranging.html
- find_barcodes
- find_datamatrices
- find_apriltags_3d_pose 3D定位
- find_apriltags AprilTag识别
- 图像滤波模块 https://book.openmv.cc/example/04-Image-Filters/adaptive-histogram-equalization.html
- 各种图像滤波、边缘滤波、腐蚀膨胀
- 锐化、取反、二值化、直方图均衡、旋转校正
沟通记录
- @Juwan 封装接口的开发样例 https://github.com/sipeed/MaixPy3/commit/3ac83ef6a479ceafce288d0b2a2378a92f15a286 建议每次都重新编译安装 python3 setup.py clean --all build && python3 install . 确保代码有更新,最终效果如下:
- 分别测试了一下沿 X 轴 和 Z 轴旋转了一下。
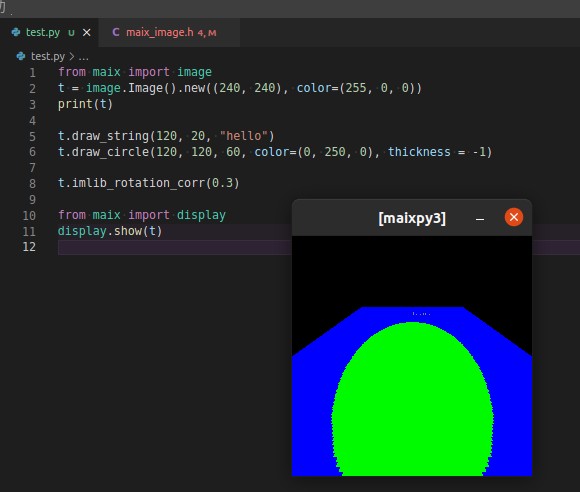
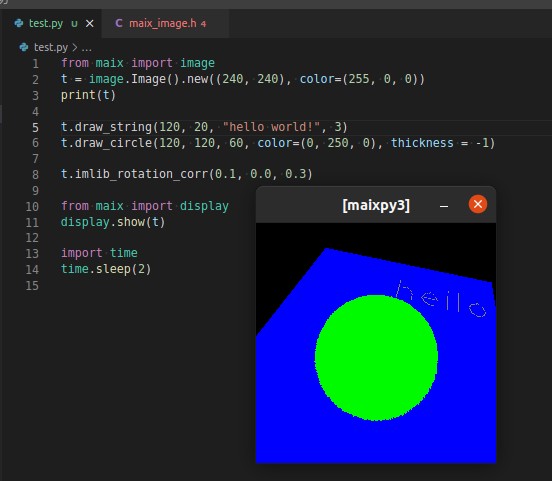
from maix import image
t = image.new((240, 240), color=(255, 0, 0))
print(t)
t.draw_string(120, 20, "hello")
t.draw_circle(120, 120, 60, color=(0, 250, 0), thickness = -1)
t.imlib_rotation_corr(0.3)
from maix import display
display.show(t)
import time
time.sleep(2)
- 测试文档示范可以从 wiki 里的这些 jupyter note 文档可以参考 API 设计和具体的测试。
https://github.com/sipeed/sipeed_wiki/tree/main/docs/soft/maixpy3/zh/usage/vision
- 举例来说是这样的
- 对应的效果在这里
https://wiki.sipeed.com/soft/maixpy3/zh/usage/vision/maixpy3-example.html
会议纪要:
暂无
