
 中文
中文MaixCAM MaixPy SPI 串行外设接口使用介绍
2025-08-08
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2025-08-08 | 1.1.0 | Neucrack | 重构文档,更以于初学者理解 |
| 2024-06-11 | 1.0.0 | iawak9lkm | 初版文档 |
前置知识
请先学会使用pinmap 模块设置引脚功能。
要让一个引脚能使用 SPI 功能,先用pinmap设置对应引脚功能为SPI。
SPI 简介
前面介绍了 I2C,通过两根线就能实现总线一对多通信,但是有局限,比如通信速度比较低(一般200k/400k), SPI (Serial Peripheral Interface,即串行外设接口) 也是一种一对多总线通信方式,速度更快,但是需要 4根线通信:
MISO:即主设备输入从设备输出(Master Output Slave Input),该引脚在从模式下发送数据,在主模式下接收数据。MOSI:即主设备输出从设备输入(Master Input Slave Output),该引脚在主模式下发送数据,在从模式下接收数据。SCK:串行总线时钟,由主设备输出,从设备输入。NSS/CS:从设备选择。它作为片选引脚,让主设备可以单独地与特定从设备通信,避免数据线上的冲突。
常用在:
- 读写 Flash。
- 两个设备通信。
- 通信方式转换,比如 SPI 转以太网。
- LCD显示驱动器。
- 输出特定方波,比如 WS2812 灯,除了用 GPIO 控制, 用 SPI 输出的数据是方波的特性,也能输出特定方波信号。
在通信协议上,SPI 行为一般如下:
SPI 支持一主多从,主设备通过片选引脚来选择需要进行通信的从设备,一般情况下,从设备 SPI 接口只需一根片选引脚,而主设备的片选引脚数量等同于设备数量。主设备使能某个从设备的片选信号期间,该从设备会响应主设备的所有请求,其余从设备会忽略总线上的所有数据。
SPI 有四种模式,取决于极性(CPOL)和相位(CPHA)的配置。
极性,影响 SPI 总线空闲时的时钟信号电平。
- CPOL = 1:表示空闲时是高电平
- CPOL = 0:表示空闲时是低电平
相位,决定 SPI 总线采集数据的跳变沿。
- CPHA = 0:表示从第一个跳变沿开始采样
- CPHA = 1:表示从第二个跳变沿开始采样
极性与相位组合成了 SPI 的四种模式:
| Mode | CPOL | CPHA |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
SPI 通常支持全双工和半双工通信。
SPI 不规定最大传输速率,没有地址方案;SPI 也没规定通信应答机制,没有规定流控制规则。
SPI 是非常常见的通信接口,通过 SPI 接口,SoC 能控制各式各样的的外围设备。
选择合适的 SPI 使用
首先我们需要知道设备有哪些引脚和 SPI,如图:
| 设备型号 | 引脚简图 | 引脚复用说明 |
|---|---|---|
| MaixCAM | 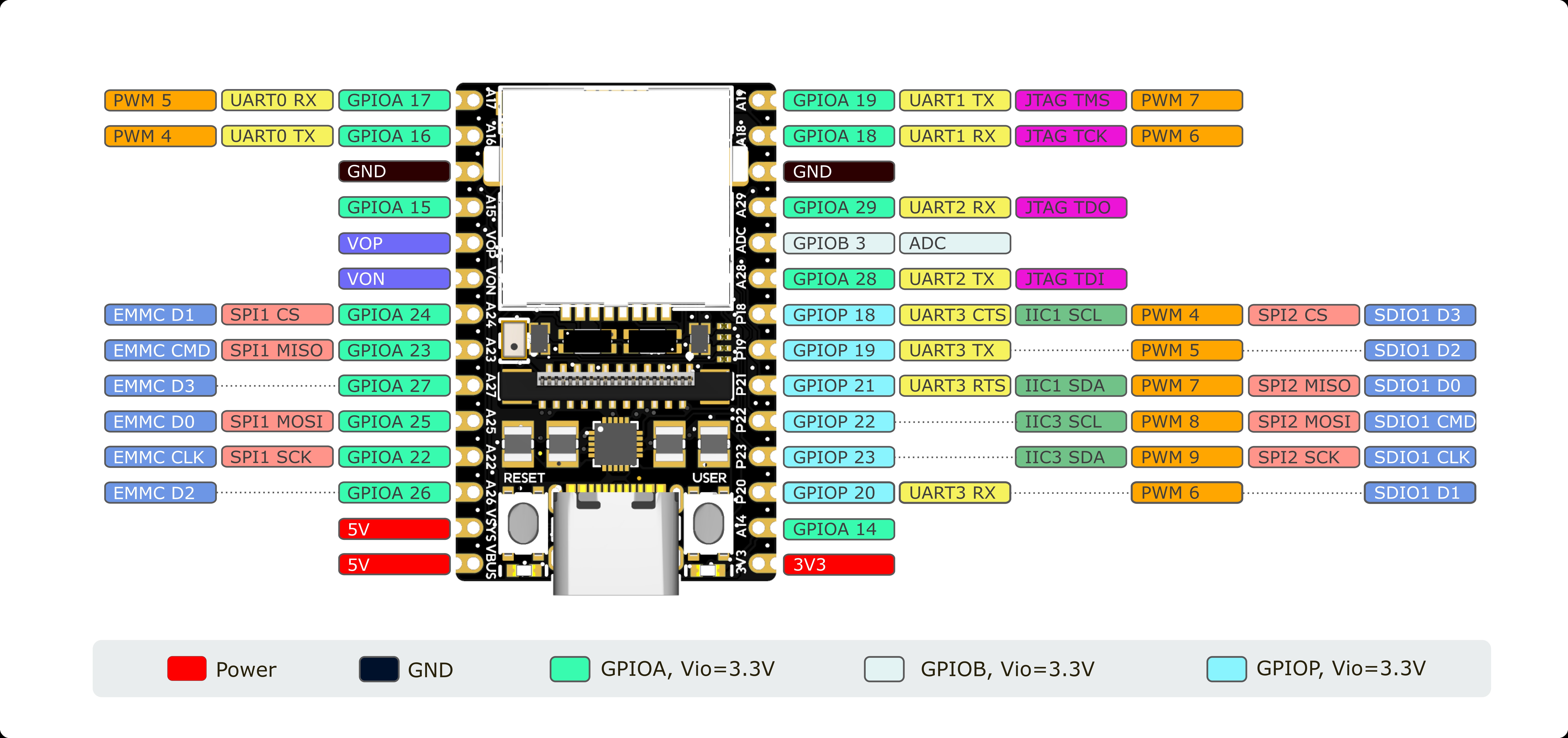 |
板子丝印比如A24是引脚名,SPI4_CS是功能名 |
| MaixCAM-Pro | 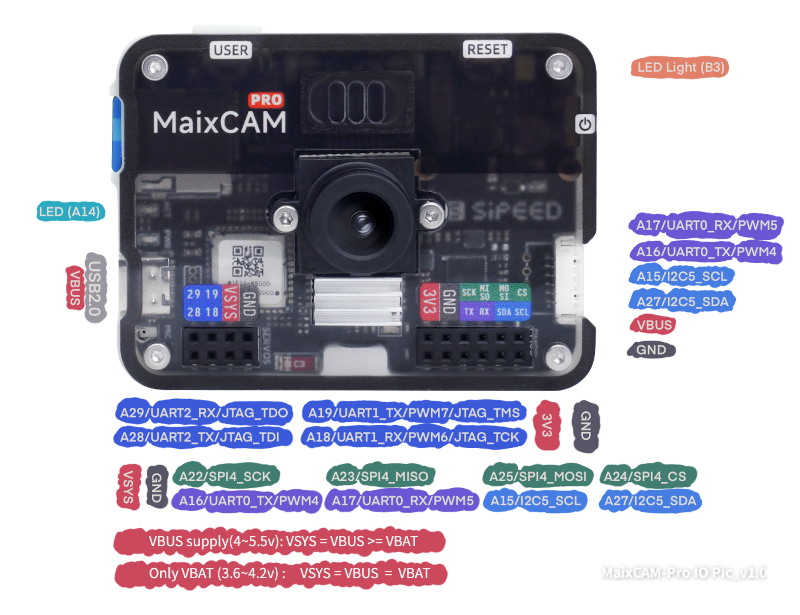 |
第一个名如A24是引脚名,对应SPI4_CS是功能名 |
| MaixCAM2 | 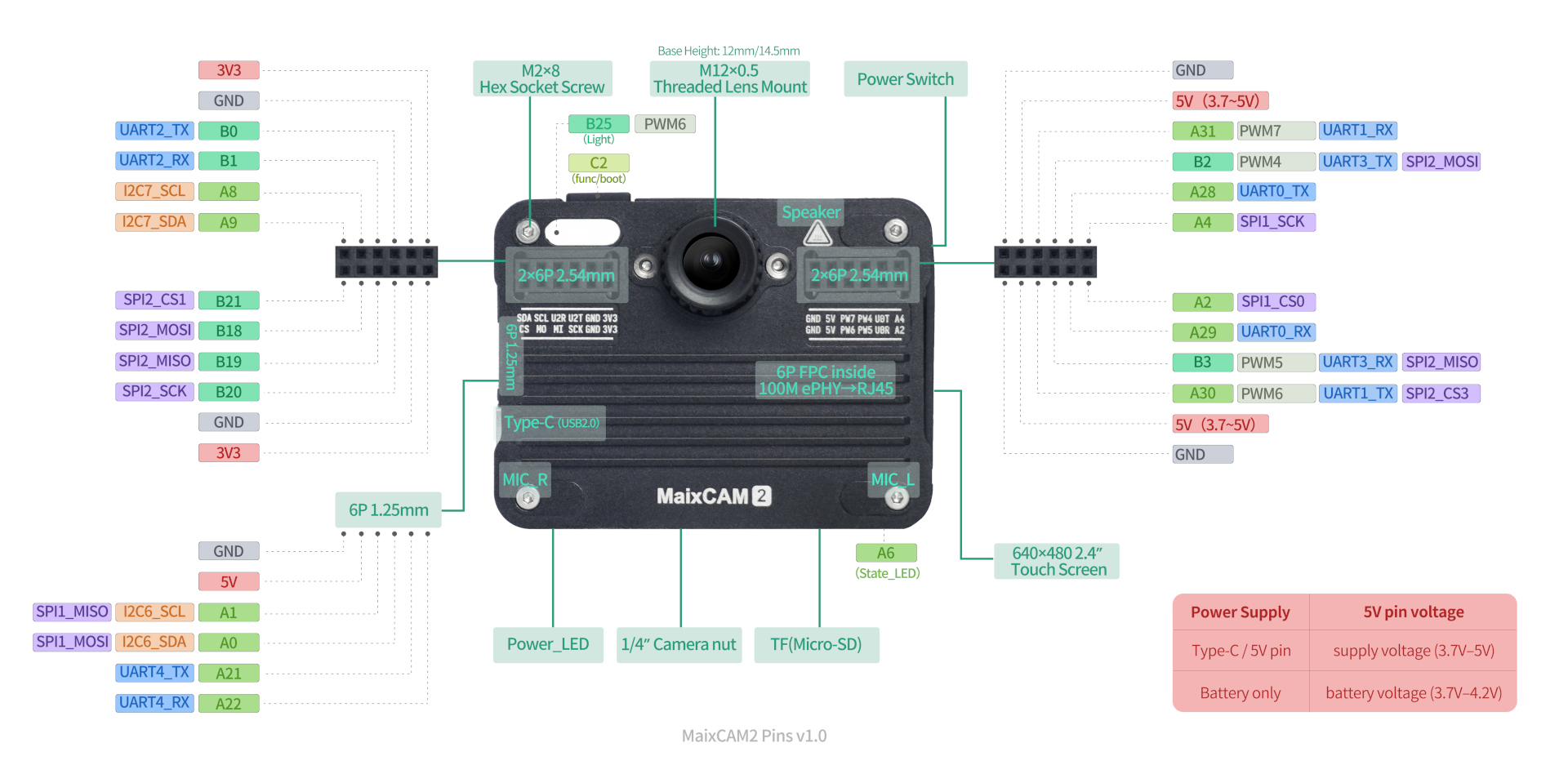 |
第一个名如B21是引脚名,对应SPI2_CS1是功能名 |
需要注意的是,引脚默认可能用做其它用途,最好避开这些引脚,请看pinmap 文档中的说明。
比如:
MaixCAM/MaixCAM-Pro: 由于其 SPI 外设的限制,只能作为 SPI 主设备使用,MaixCAM 的 SPI 暂时不支持修改硬件 CS 引脚有效电平,所有 SPI 硬件 CS 的有效电平为低电平。如需要使用其他的 CS 有效电平,请在 SPI API 中配置软件 CS 引脚及其有效电平。SPI4 为软件模拟的 SPI,实测最大速率为 1.25MHz,使用方法与硬件 SPI 无异。MaixCAM2: 默认有 2 个硬件 SPI 引脚,SPI2 默认功能就是 SPI, SPI1 的引脚需要先设置引脚复用,具体看pinmap。
MaixPy 中使用 SPI
通过 MaixPy 使用 SPI,先设置好 pinmap,构造SPI对象通信即可。
这里一个例子,先连接该 SPI 的 MOSI 和 MISO,自己全双工收发:
from maix import spi, pinmap, sys, err
# get pin and SPI number according to device id
device_id = sys.device_id()
if device_id == "maixcam2":
pin_function = {
"B21": "SPI2_CS1",
"B19": "SPI2_MISO",
"B18": "SPI2_MOSI",
"B20": "SPI2_SCK"
}
spi_id = 2
else:
pin_function = {
"A24": "SPI4_CS",
"A23": "SPI4_MISO",
"A25": "SPI4_MOSI",
"A22": "SPI4_SCK"
}
spi_id = 4
for pin, func in pin_function.items():
err.check_raise(pinmap.set_pin_function(pin, func), f"Failed set pin{pin} function to {func}")
spidev = spi.SPI(spi_id, spi.Mode.MASTER, 1250000)
### Example of full parameter passing, fully documention see API documentation.
# spidev = spi.SPI(id=4, # SPI ID
# mode=spi.Mode.MASTER, # SPI mode
# freq=1250000, # SPI speed
# polarity=0, # CPOL 0/1, default is 0
# phase=0, # CPHA 0/1, default is 0
# bits=8, # Bits of SPI, default is 8
# hw_cs=-1, # use default hardware cs.
# soft_cs="", # If you want use soft cs, set GPIO name,
# # e.g. GPIOA19(MaixCAM), GPIOA2(MaixCAM2)
# # you should set pinmap first by yourself.
# cs_active_low=true # cs pin active low voltage level
b = bytes(range(0, 8))
res = spidev.write_read(b, len(b))
if res == b:
print("loopback test succeed")
else:
print("loopback test failed")
print(f"send:{b}\nread:{res}")
更多例程
API 文档
更多 API 看 SPI API 文档
