
 中文
中文MaixCAM MaixPy 使用 PWM
2025-08-08
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2025-08-08 | 1.1.0 | Neucrack | 重构文档,更以于初学者理解 |
前置知识
请先学会使用pinmap 模块设置引脚功能。
要让一个引脚能使用 PWM 功能,先用pinmap设置对应引脚功能为PWM。
PWM 简介
使用 PWM 可以通过一个引脚输出一个方波,设置合适的周期和占空比(低电平占整个周期的比例)可以在不同场景中发挥作用,比如:
- 控制舵机转向。
- 控制无刷电机旋转速度。
- 控制灯光亮度(PWM 调光)。
关于更多 PWM 基础知识,网上有很多好教程,本文不展开讲解,请自行搜索学习。
选择合适的 PWM 使用
首先我们需要知道设备有哪些引脚和 PWM,如图:
| 设备型号 | 引脚简图 | 引脚复用说明 |
|---|---|---|
| MaixCAM | 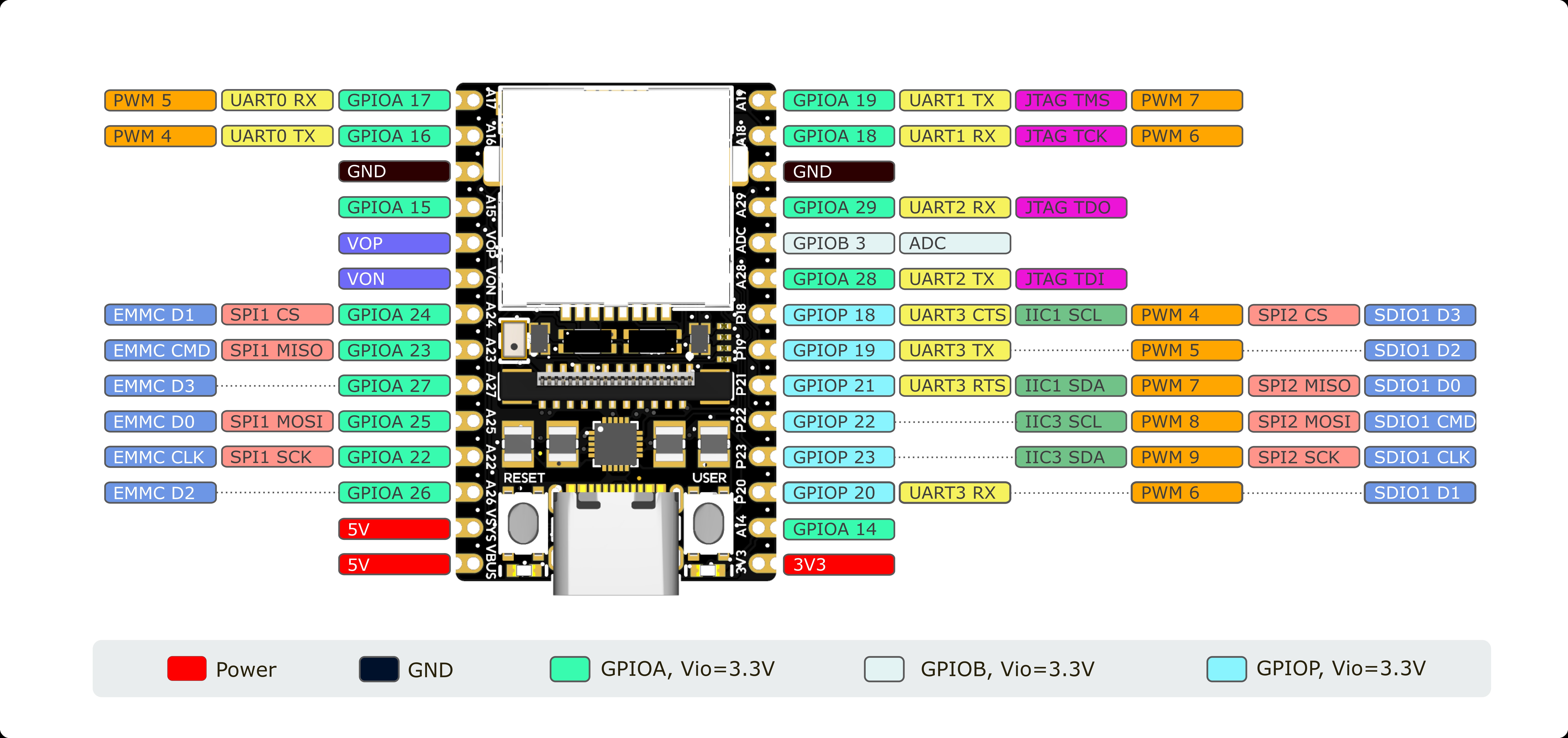 |
板子丝印比如A19是引脚名,PWM7是功能名 |
| MaixCAM-Pro | 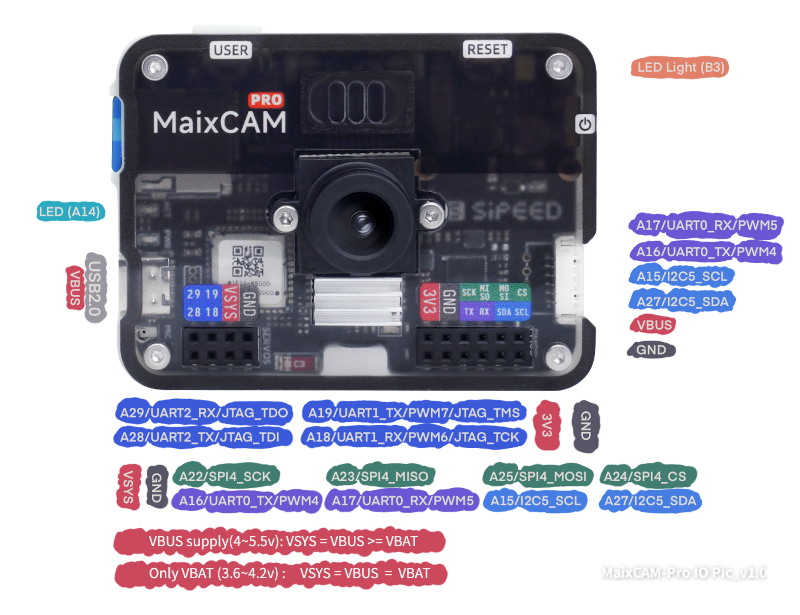 |
第一个名如A19是引脚名,对应PWM7是功能名 |
| MaixCAM2 | 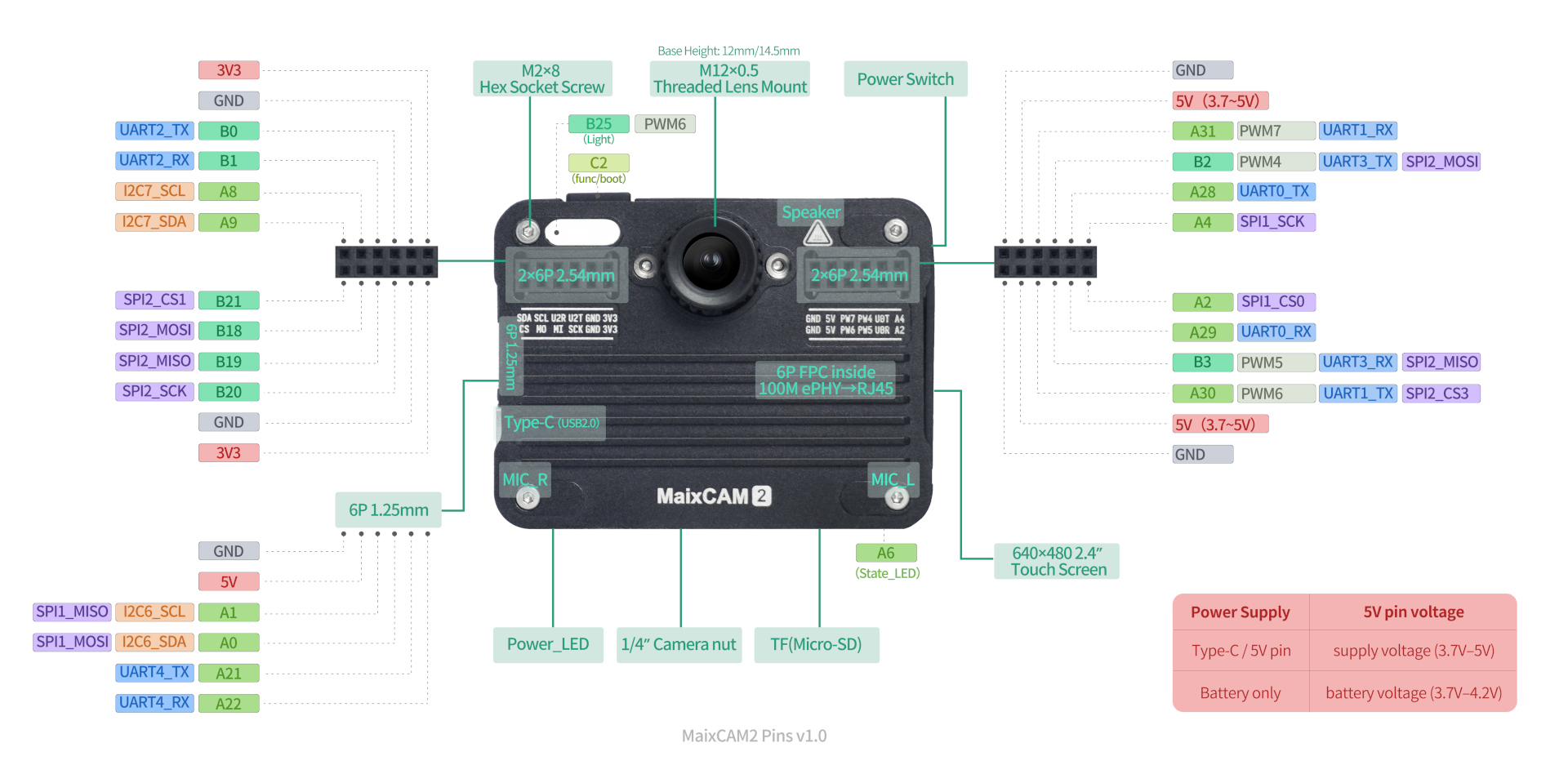 |
第一个名如B25是引脚名,对应PWM6是功能名 |
需要注意的是,引脚默认可能用做其它用途,最好避开这些引脚,请看pinmap 文档中的说明。
比如:
MaixCAM/MaixCAM-Pro: 因为WiFi使用了SDIO1的所有引脚,所以PWM4~9不建议使用。MaixCAM2: 默认有 4个 PWM 引脚可以直接使用,照明 LED 也可以用PWM6控制,注意PWM6只能在A30和照明 LED 二选一使用。
MaixPy 使用 PWM 控制 LED 亮度
利用人眼的暂留效应,一直打开 LED 就是最亮,不停高速开关 LED 就能实现调亮度,关的时间占比越长就越暗。
from maix import pwm, time, pinmap, sys, err
# get pin and pwm number according to device id
device_id = sys.device_id()
if device_id == "maixcam2":
pin_name = "B25" # LED light
pwm_id = 6
else:
pin_name = "A18" # A18 pin
pwm_id = 6
# set pinmap
err.check_raise(pinmap.set_pin_function(pin_name, f"PWM{pwm_id}"), "set pinmap failed")
SERVO_PERIOD = 100000 # 100kHz 0.01ms
out = pwm.PWM(pwm_id, freq=SERVO_PERIOD, duty=0, enable=True)
for i in range(100):
print(i)
out.duty(i)
time.sleep_ms(100)
for i in range(100):
print(100 - i)
out.duty(100 - i)
time.sleep_ms(100)
MaixPy 使用 PWM 控制舵机
控制舵机角度就是控制占空比,不同占空比对应不同角度,可以看舵机的文档。
现在控制舵机从最小角度旋转到最大角度再旋转回最小角度:
from maix import pwm, time, pinmap, err
SERVO_PERIOD = 50 # 50Hz 20ms
SERVO_MIN_DUTY = 2.5 # 2.5% -> 0.5ms
SERVO_MAX_DUTY = 12.5 # 12.5% -> 2.5ms
# get pin and pwm number according to device id
device_id = sys.device_id()
if device_id == "maixcam2":
pin_name = "A31"
pwm_id = 7
else:
pin_name = "A19"
pwm_id = 7
# set pinmap
err.check_raise(pinmap.set_pin_function(pin_name, f"PWM{pwm_id}"), "set pinmap failed")
def angle_to_duty(percent):
return (SERVO_MAX_DUTY - SERVO_MIN_DUTY) * percent / 100.0 + SERVO_MIN_DUTY
out = pwm.PWM(pwm_id, freq=SERVO_PERIOD, duty=angle_to_duty(0), enable=True)
for i in range(100):
out.duty(angle_to_duty(i))
time.sleep_ms(100)
for i in range(100):
out.duty(angle_to_duty(100 - i))
time.sleep_ms(100)
更多例程
API 文档
更多 API 看 PWM API 文档
