

 中文
中文外设使用
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2024-07-30 | v1.0 | zepan |
|
SoC 相关
CPU 运行频率
sudo cat /sys/devices/system/cpu/cpu*/cpufreq/cpuinfo_cur_freq
单位为 KHz
注意系统自带温控策略,当系统过于空闲或者温度过高时,都会降频。请保持良好散热,使得 CPU 在 60 度以下,获得最佳性能。
芯片温度
cat /sys/class/thermal/thermal_zone0/temp
单位为0.001摄氏度
UART
系统串口
LicheePi 3A 的系统串口是 UART0,在侧边插针中有引出。
你可以使用 USB 转串口模块连接该串口,即 U0-RX 和 U0-TX,注意交叉连接,以及 GND 连接。
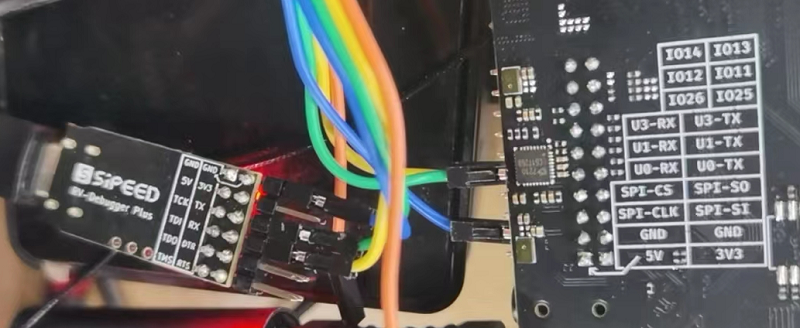
连接完成后,即可使用串口工具进行通信,Windows 下推荐 XShell,mobaterm,Linux下推荐 minicom
设置串口波特率为 115200,即可在串口终端下登录并进行指令操作:
注:刚连接后可以敲几个回车查看是否有反应,如果没有反应则检查接线或者串口配置
一般串口
LicheePi 4A的侧边插针中还引出了 UART1, 同样可以操作。
默认镜像中仅使能了 UART1, 其它串口可能需要重新配置设备树操作。
查看串口设备
ls /dev/ttyS*
查看串口的波特率等信息
stty -F /dev/ttyS1 -a
设置串口波特率、数据模式
stty -F /dev/ttyS1 ispeed 115200 ospeed 115200 cs8
查看串口数据
cat /dev/ttyS1
发送串口数据
echo "12345" > /dev/ttyS1
其它方法
也可以使用minicom,或者pyserial库进行串口操作,请用户自行查找相关资料使用。
I2C
LicheePi 3A 上有多个 I2C 设备(I2C0/2/5/6),其中 I2C2 连接了codec芯片;I2C5连接IO扩展芯片,也连接到了插针;I2C6连接触摸屏和IO扩展芯片。
这里我们使用 i2c-tools 来进行 i2c 验证操作,默认镜像未安装i2c-tools,请先使用apt安装
apt install i2c-tools
列出所有I2C总线:
root@k1:~# i2cdetect -l
i2c-0 i2c spacemit-i2c-adapter I2C adapter
i2c-2 i2c spacemit-i2c-adapter I2C adapter
i2c-5 i2c spacemit-i2c-adapter I2C adapter
i2c-6 i2c spacemit-i2c-adapter I2C adapter
i2c-8 i2c spacemit-i2c-adapter I2C adapter
检测 I2C 总线上的设备,可见 PCA9557PW 的 I2C 地址为 0x18,与原理图相符:
sipeed@lpi4a:~$ sudo /sbin/i2cdetect -r -y 5
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- UU -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
此外还可以使用 i2cdump 来 dump 指定 i2c 地址的所有寄存器,用 i2cget 来读出指定 i2c 地址的指定寄存器值,用 i2cset 来写入指定 i2c 地址的指定寄存器值。
不过由于 IO 扩展芯片已经被内核使用,所以无法直接使用这些命令验证。用户可以自行在 I2C2 上外接外设来验证。
SPI
LicheePi3A上预留了两路SPI,一路是背面空贴的SPI Flash焊盘,一路是插针上的SPI。
SPI 常用的 ioctl 命令:
- SPI_IOC_MESSAGE:用于发送和接收 SPI 消息,可以用于读写数据、控制设备等操作
- SPI_IOC_WR_MODE:用于设置 SPI 设备的工作模式, 如 CPOL、CPHA 等
- SPI_IOC_RD_MODE:用于读取 SPI 设备的工作模式
- SPI_IOC_WR_LSB_FIRST:用于设置 SPI 设备的字节顺序,即最高位先传输还是最低位先传输
- SPI_IOC_RD_LSB_FIRST:用于读取 SPI 设备的字节顺序
- SPI_IOC_WR_BITS_PER_WORD:用于设置 SPI 设备的数据位宽
- SPI_IOC_RD_BITS_PER_WORD:用于读取 SPI 设备的数据位宽
- SPI_IOC_WR_MAX_SPEED_HZ:用于设置 SPI 设备的最大时钟频率
- SPI_IOC_RD_MAX_SPEED_HZ:用于读取 SPI 设备的最大时钟频率
- SPI_IOC_WR_MODE32:用于设置 SPI 设备的 32 位模式, 如 CPOL、CPHA 等
- SPI_IOC_RD_MODE32:用于读取 SPI 设备的 32 位模式
以上是一些常用的 SPI 设备 ioctl 命令,可以用于配置和控制 SPI 设备的各种参数。
打开/关闭 SPI 设备:
int open(const char *pathname, int flags);
int close(int fd);
需要引用的头文件:
#include<fcntl.h>
#include<unistd.h>
示例代码:
#include <stdint.h>
#include <unistd.h> // C 语言标准头文件,定义了 POSIX API 的一部分,如文件操作、进程管理等
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <getopt.h>
#include <fcntl.h> // C 语言头文件,定义了文件控制相关的宏和函数
#include <sys/ioctl.h> // C 语言头文件,定义了 ioctl 函数和相关宏
#include <linux/types.h> // Linux 内核头文件,定义了内核中使用的一些基本数据类型
#include <linux/spi/spidev.h> // Linux SPI 子系统头文件,定义了 SPI 设备驱动程序使用的数据结构和 ioctl 命令
#define DATA_NUM 2 // 自定义数据长度
#define CHECK(ret, str) if (ret < 0) {printf("%s\r\n", str); return ret;}
static uint8_t bits = 8;
static uint32_t speed = 1000000; // 1M Hz
static int mode = 0;
int main(int argc, char *argv[]) {
int ret, fd;
fd = open("/dev/spidev2.0", O_RDWR);
CHECK(fd, "can't open device"); // 打开具体 spi 设备
mode = SPI_MODE_0 | SPI_CS_HIGH;
ret = ioctl(fd, SPI_IOC_WR_MODE32, &mode); //设置 SPI 模式
CHECK(ret, "can't set spi mode");
ret = ioctl(fd, SPI_IOC_RD_MODE32, &mode); //获取 SPI 模式设置
CHECK(ret, "can't get spi mode");
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits); //设置 SPI 的 bit/word
CHECK(ret, "can't set bits per word");
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits); //获取 SPI 的 bit/word 设置
CHECK(ret, "can't get bits per word");
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed); //设置 SPI 的最大传输速度
CHECK(ret, "can't set max speed hz");
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed); //获取 SPI 的最大传输速度设置
CHECK(ret, "can't get max speed hz");
printf("spi mode: %d\n", mode);
printf("bits per word: %d\n", bits);
printf("max speed: %d Hz (%d KHz)\n", speed, speed/1000);
//数据传输
uint8_t tx[] = {0x11, 0x22};
uint8_t rx[DATA_NUM] = {0};
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx, //定义发送缓冲区指针
.rx_buf = (unsigned long)rx, //定义接收缓冲区指针
.len = DATA_NUM,
.delay_usecs = 0,
.speed_hz = speed,
.bits_per_word = bits
};
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); //执行 spidev.c 中 ioctl 的 default 进行数据传输
CHECK(ret, "can't send spi message");
printf("tx: %.2X %.2X\r\n", tx[0], tx[1]);
printf("rx: %.2X %.2X\r\n", rx[0], rx[1]);
close(fd);
return ret;
}
USB
LPi3A 具备4个USB3.0口,插入USB device即可工作,这里不再赘述。
注意,如果你使用的是LPi4A的底板,由于底板差异会导致默认镜像下USB A口无法使用,首次使用需要先连接串口或者网络,进入设备终端,替换dtb
在/boot/spacemit/6.1.15/下,将 k1-x_lpi3a_4a.dtb 覆盖到为 k1-x_lpi3a.dtb,重启即可使用USB
ETH
LicheePi4A 具有双千兆网口,其中 Eth0 还具备 PoE 功能。
PoE
LicheePi 4A的Ethernet 0接口具有PoE功能,可通过PoE实现供电。
PoE供电模块需要自行购买,使用5V电压,35.6mm长度的规格,可以通过搜索“5V PoE 插针”关键词搜索得到。
当目视方向正对“POE POWER”标识时,针脚左边4根针脚定义从左到右依次为:VA1、VA2、VB1、VB2,右边为:GND、5VIN。
Speaker Audio
LicheePi 4A 上有两个模拟硅麦,使用 ES7210 CODEC,以及有一路板载的扬声器,和立体声耳机,使用 ES8156 CODEC。
注:板载扬声器与立体声耳机使用了互斥设计,插入耳机后,音频输出自动切换到耳机,板载扬声器失能。
使用 aplay 和 arecord 可以进行简易录放测试, 注意板载扬声器是右声道。
#!/bin/bash
echo "Play Test Audio"
aplay -Dhw:1,0 disco48.wav
你还可以使用alsa相关工具,如alsamixer,进行音量调整等操作。
注意目前只支持48KHz音频播放。录音功能正在开发中。
MIPI CSI
LicheePi 3A 背面有两个摄像头接口,24Pin的是兼容LPi4A的2lane摄像头接口,22Pin的是兼容树莓派的22Pin 4lane摄像头接口。
MIPI DSI
LicheePi 3A 具有 MIPI DSI0 接口,支持 1080P 视频输出,可以选配 10.1 寸 1280x800 的触摸屏。
连接方式如下图,两根 fpc 软排线均为下接(排线末端金属触点的那一面朝下),其中触摸屏的转接小板在连接时需要注意方向,确认ToLPi4A 的那一头连接LPi4A的触摸软排线,ToLcdTP 的那一头连接屏幕:
软排线金属触点面示意图:
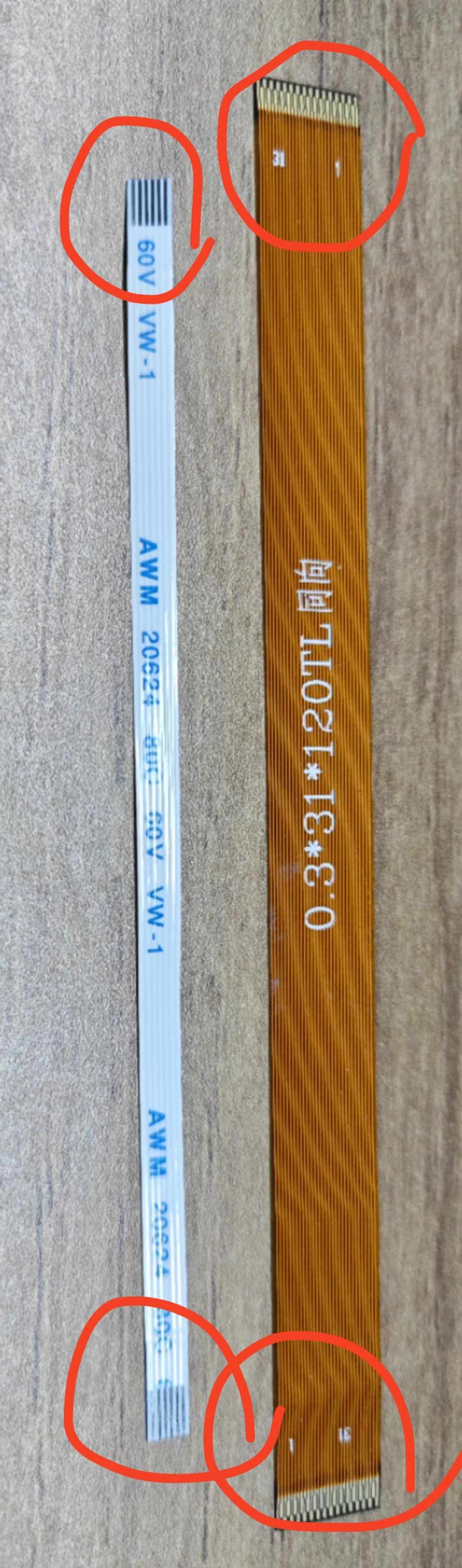
注意在连接前,先拨起接口上用于固定排线的黑色翻盖,确认接好后再拨下。
触摸屏软排线连接:
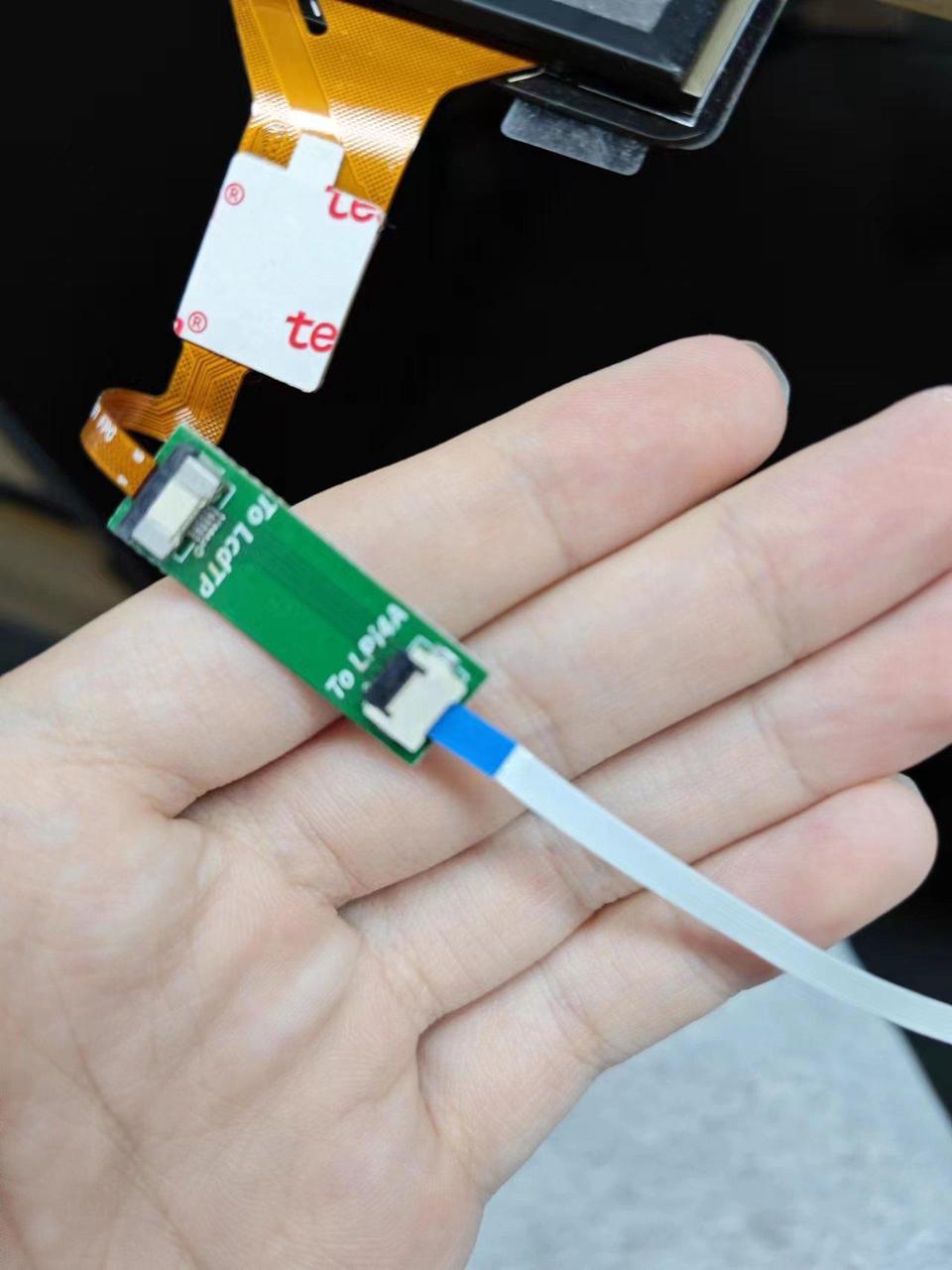
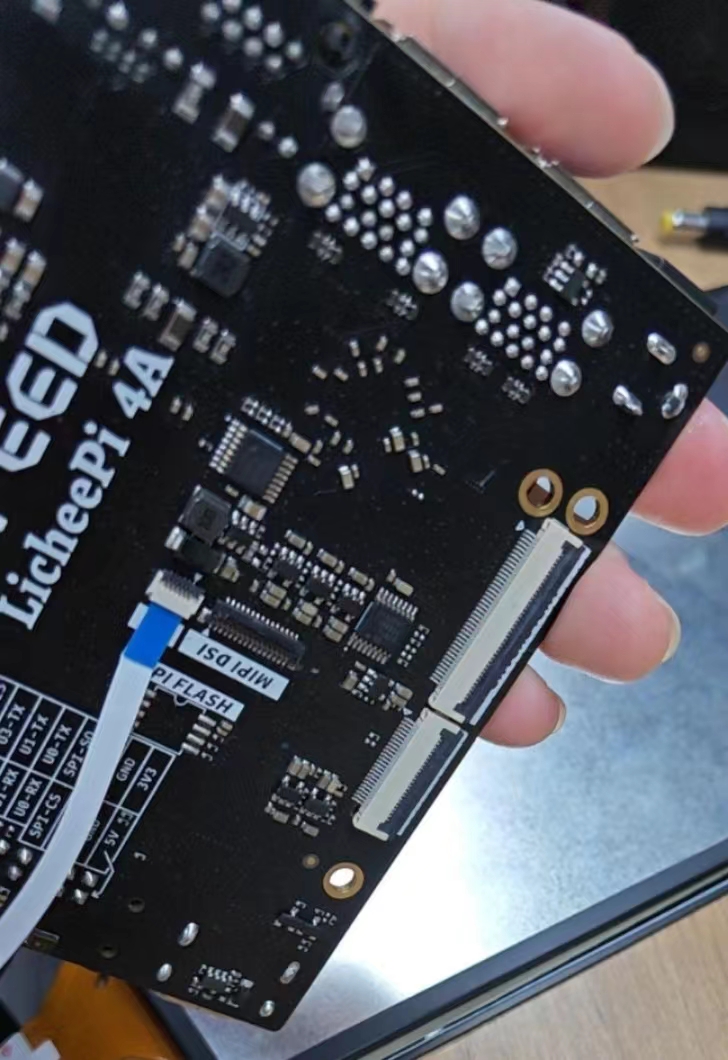
MIPI 屏软排线连接:
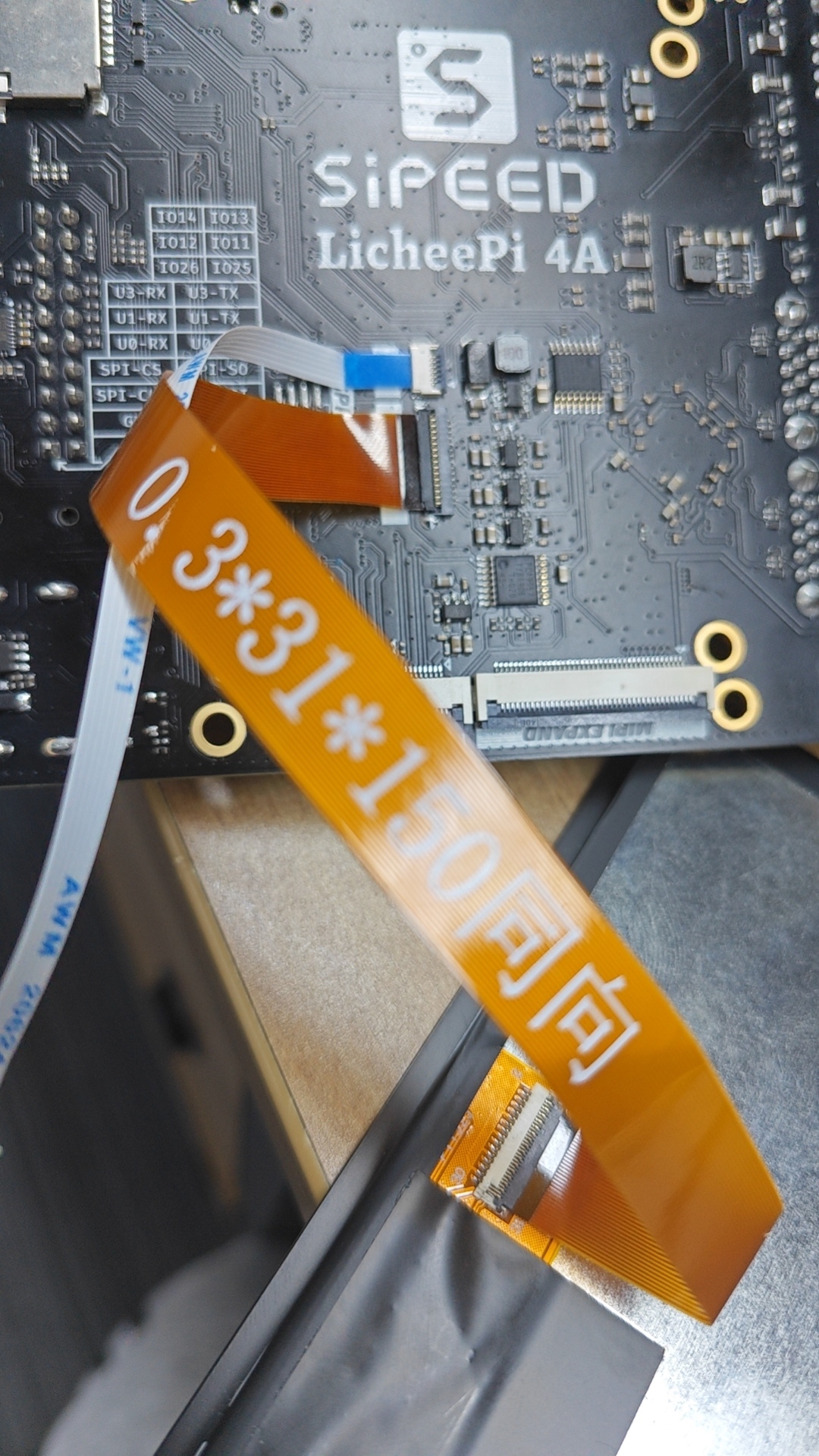
确认连接无误后,使用支持 MIPI 屏幕的固件(k1-x_lpi3a_lcd.dtb),开机即可看到 MIPI 屏幕显示。
JTAG
K1 的 JTAG接口与TF卡信号复用,可使用TF转JTAG小板连接。
GPU
使用命令以下命令可以实时查看 GPU 的状态:
sudo watch cat /sys/kernel/debug/pvr/status
其它
欢迎投稿~ 投稿接受后可得¥5~150($1~20)优惠券!
