中文
中文MaixSense 系列
MaixSense 是什么?
MaixSense 系列产品搭载 TOF 深度摄像头,目前有 MaixSense-A010 和 MaixSense-A075V 两款产品。
- MS-A010 是一款由 BL702 + 炬佑 100x100 TOF 模组所组成的极致性价比的 TOF 3D 传感器模组,最大支持 100x100 的分辨率和 8 位精度,并且带有 240×135 的 LCD 显示屏可实时预览 color map 后的深度图。
- 而 MS-A075V 是一款具有 RGB 功能的 3D TOF 摄像机模组,该模组可以实现 Linux 免驱的即插即用,实现实时彩色 3D 显示。

购买方式:淘宝链接
MaixSense-A010 |
MaixSense-A075V |
|
|---|---|---|
 |
 |
|
| 接口 | 1.25mm 串口连接器 *1 Type-C USB2.0 *1 |
1.25mm 串口连接器 *1 Type-C USB2.0 *1 |
| 分辨率 | TOF:100x100@30fps | RGB:1600x1200@30fps TOF:320x240@60fps |
| 视场角 | RGB:无 TOF:70°(H) * 60°(V) |
RGB:120° TOF:55°(H)*72°(H) |
TOF 像素尺寸 |
15um | |
| 激光发射器 | 40nm VCSEL | 940nm,3W |
| 测量范围 | 0.2-2.5m | 0.15-1.5m |
| 测量精度 | <=1%/cm | <=1%/cm |
MaixSense 能做什么?
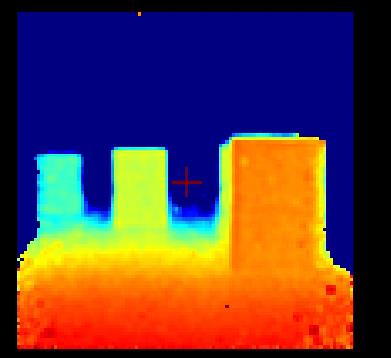
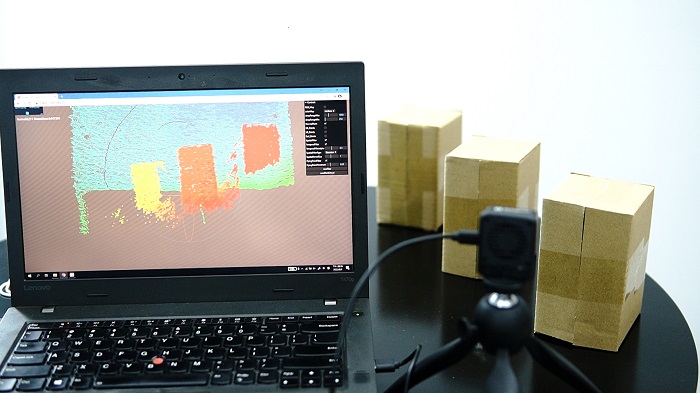
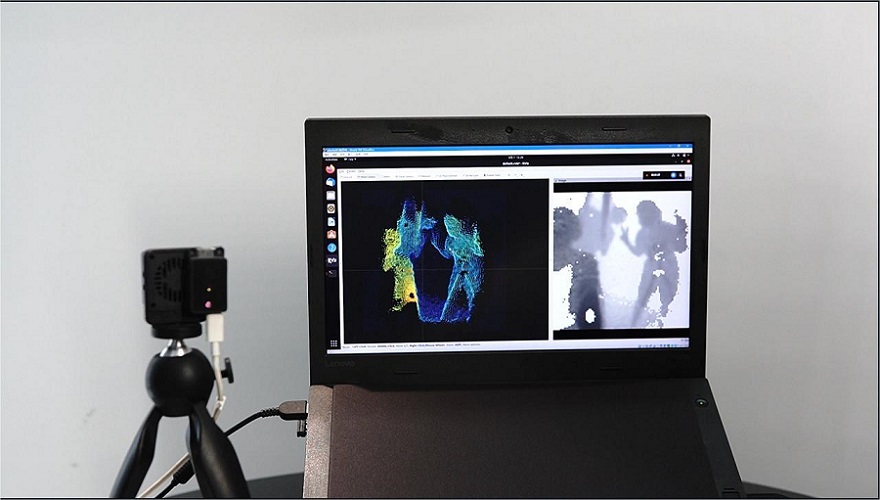
案例:远中近物体实拍
高精度的映射物品摆放距离的差异,点云图可直观感受到更真实的可视化。

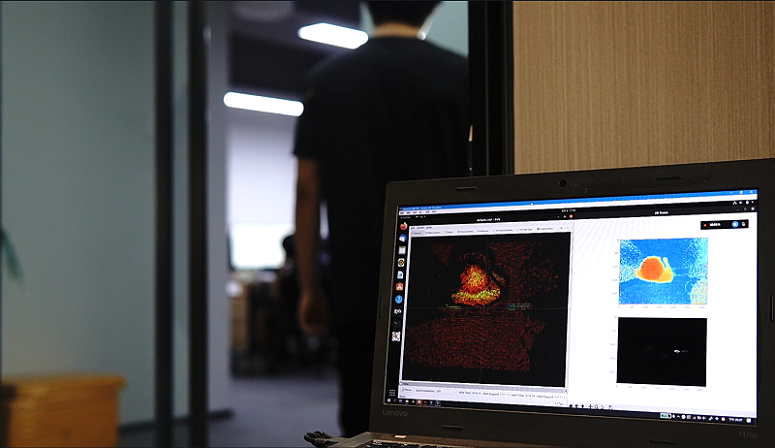
案例:人流统计
可实时监控人流,进行高精度、大分辨率的统计。
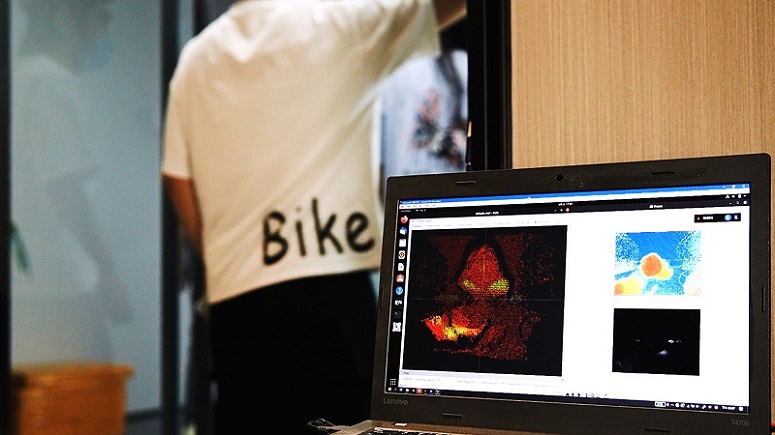
案例:小车避障
可搭载于小车移动并判断画面是否有障碍物,模组自带 LCD 屏幕精准显示距离并做出反应规避障碍物。
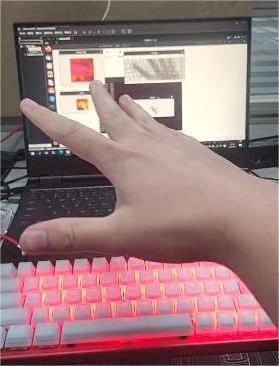
案例:键盘灯跟随
实现超酷炫的键盘灯跟随,实时跟踪手部的位置,再根据手部的位置映射键盘灯。
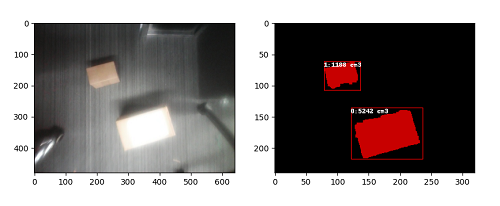
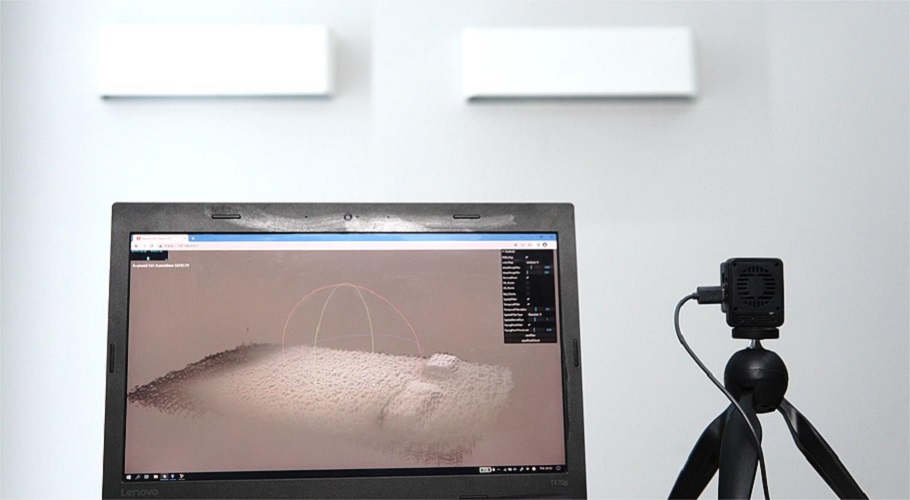
案例:体积测量
通过 SDK 获取到的模组内参数后,计算粗略点云并累加总体积,达到体积测量的效果。
案例:外接 MCU
MS-A010 拥有强大的兼容性,基于串口协议的数据传输。
可外接 K210 bit 这样的单片机开发板或树莓派之类的 linux 开发板来进行二次开发。

案例:接入 ROS1 + ROS2
双支持 ROS 系统,开放 ROS1+ROS2 接入功能包,可快速获得深度数据及深度图。
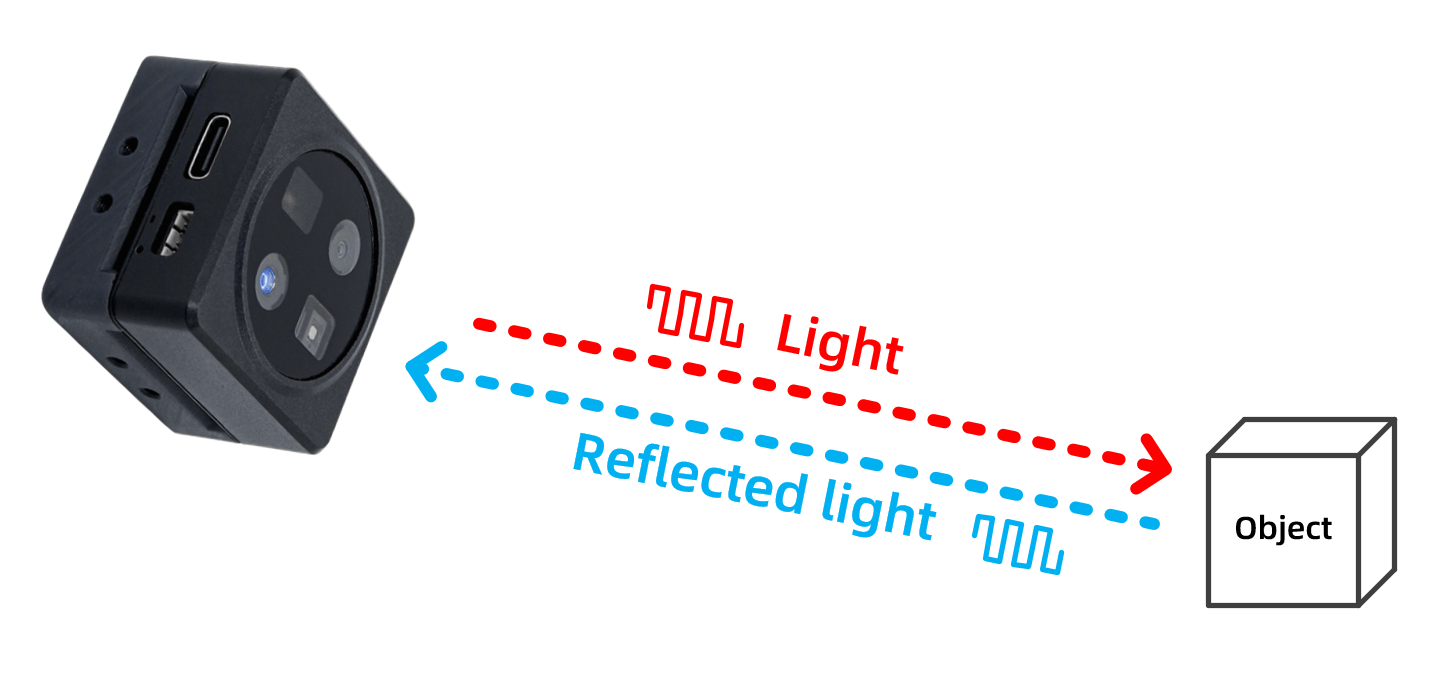
快速了解 TOF 技术
- TOF: 是一种距离测量的方法,通过测量发射器和反射器之间的超声波/微波/光等信号的“飞行时间”来计算两者之间的距离。 可以实现TOF测距的是TOF传感器。 最常用的是红外线或激光测距。
- 物体之间的距离存在差异。 该模块通过捕获的深度值的差异来显示冷色和暖色。冷暖色随着距离的映射而变化,距离越近色调呈暖调(橘红)而越远色调呈冷调(蓝色)。